Protocol Documentation
Table of Contents
Top
ocellus_module_service.proto
License
Copyright 2021 Byte Motion AB
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
Summary
The Ocellus system allows for remote modules
to be integrated into it's core module system.
This protobuf describes an API for remote modules
to bind themselves to Ocellus and therein recieve
streaming events and provide streaming responses.
The API communcates over gRPC with protocol
buffers which are described in detail here.
The afformentioned link will also provide instructions
for building clients for most languages.
More details on bidirectional streaming can
be found here.
Click here to download the modules service protobuf file
Click here to download the types protobuf file
See a python example here
See a javascript example here
BindRequest
Bind payload of the initial request
registering the remote module with Ocellus
| Field |
Type |
Label |
Description |
| name |
string |
|
The human readible name of the module. Must be unique |
| inputs |
IOData |
repeated |
Deprecated. The input data types the module requires. May have several of the same input data types mapped with different names. |
| outputs |
IOData |
repeated |
Deprecated. Data the module will output, made available to other modules. |
DownloadRefRequest
Download reference payload
| Field |
Type |
Label |
Description |
| urn |
string |
|
|
DownloadRefResponse
IOData
Module input/output data specification
| Field |
Type |
Label |
Description |
| name |
string |
|
Unique name of the input/output data |
| data_type |
DataType |
|
Data type of the input/output data |
| key |
string |
|
The full key of the input/output data used when wiring module inputs and outputs |
ModuleData
Bind payload
| Field |
Type |
Label |
Description |
| bind_request |
BindRequest |
|
|
| data |
OutputData |
|
|
| timestamp |
int64 |
|
This should be set to the unix time in milliseconds which data was aquired or the start of the binding process. For example, the time at which the shutter opened when aquiring a mat from a camera. Or a critical time in the event generation process |
OutputData
| Field |
Type |
Label |
Description |
| intrinsics |
Intrinsics |
|
intrinsics data |
| contours |
Contour |
repeated |
contours data |
| camera |
Camera |
|
cameras data |
| image |
OutputData.Image |
|
images data |
| point_cloud |
PointCloud |
|
point clouds data |
| items |
Item |
repeated |
items data |
| decimal |
double |
|
generic decimal data |
| integer |
int32 |
|
generic integer data |
| string |
string |
|
generic string data |
| errors |
Error |
repeated |
errors, will cause ocellus to go to an error state |
| position |
Position |
|
position data |
| rotation |
Quaternion |
|
rotation data |
OutputData.Image
| Field |
Type |
Label |
Description |
| data |
bytes |
|
Currently, the following file formats are supported: |
-
Windows bitmaps - .bmp, .dib (always supported)
-
JPEG files - .jpeg, .jpg, *.jpe (see the Note section)
-
JPEG 2000 files - *.jp2 (see the Note section)
-
Portable Network Graphics - *.png (see the Note section)
-
WebP - *.webp (see the Note section)
-
Portable image format - .pbm, .pgm, .ppm .pxm, *.pnm (always supported)
-
Sun rasters - .sr, .ras (always supported)
-
TIFF files - .tiff, .tif (see the Note section)
-
OpenEXR Image files - *.exr (see the Note section)
-
Radiance HDR - .hdr, .pic (always supported)
-
Raster and Vector geospatial data supported by GDAL (see the Note section) |
PointCloud
| Field |
Type |
Label |
Description |
| width |
int32 |
|
|
| height |
int32 |
|
|
| vertices |
Vector3Dim |
repeated |
Not included in response if "format=depth" included in URN |
| mat32_fc1_data |
bytes |
|
Only included in response if "format=depth" included in URN 32-bit floats encoded as byte array, every pixel is a value in meters |
StateEvent
Ocellus works by passing a state through several reducers internaly. The
remote module is treated no different except it passes only the data
specified in the remote modules inputs, in the UI for example.
| Field |
Type |
Label |
Description |
| data |
Data |
|
Available input names (keys in each map) are found in the OcellusModuleInfoService#GetModules rpc endpoints GetModulesResponse.outputParameters.key fields. |
| frame_id |
int64 |
|
|
| timestamp |
int64 |
|
unix time in milliseconds which this event was created in ocellus |
OcellusModuleService
Service for remote modules
| Method Name |
Request Type |
Response Type |
Description |
| Bind |
ModuleData stream |
StateEvent stream |
Used to bind a remote module to the Ocellus. Initial bind response will always receive an empty StateEvent containing only the initial frame id. This can be used in two ways: |
-
If the remote module is generating data for the rest of the pipeline it may begin. For example, it may begin sending images and pointclouds.
-
If the remote module is processing data only, the data will begin to arrive in the next message. |
| DownloadRef | DownloadRefRequest | DownloadRefResponse | Used to download reference URNs provided by StateEvents. The data will only be available from after an event has been received and a response is sent. |
Top
ocellus_types.proto
License
Copyright 2021 Byte Motion AB
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.
Camera
| Field |
Type |
Label |
Description |
| name |
string |
|
name of camera |
| position |
Position |
|
Position relative scene center point |
| quaternion |
Quaternion |
|
Quaternion relative scene center point |
| euler_angles |
EulerAngles |
|
EulerAngles relative scene center point |
| intrinsics |
Intrinsics |
|
|
| camera_type |
CameraType |
|
|
Color
The three-channel RGB color model supplemented with a fourth alpha channel.
| Field |
Type |
Label |
Description |
| r |
float |
|
red channel intensity, a number between 0 and 255 |
| g |
float |
|
green channel intensity, a number between 0 and 255 |
| b |
float |
|
blue channel intensity, a number between 0 and 255 |
| a |
float |
|
a number between 0.0 (fully transparent) and 1.0 (fully opaque). |
Contour
Contours can be explained simply as a curve joining
all the continuous points (along the boundary).
| Field |
Type |
Label |
Description |
| outer_contour |
Points |
|
|
| hole_contours |
Points |
repeated |
|
| area |
double |
|
|
Contours
| Field |
Type |
Label |
Description |
| contours |
Contour |
repeated |
|
Data
A collection of maps, each of which's key
must be of the format "<module-id>/<output-name>"
Example: MyBlobModule/RGBA_IMAGE
Data.CamerasEntry
Data.ContoursEntry
Data.DecimalsEntry
Data.IntegersEntry
Data.ItemsEntry
Data.PointCloudsEntry
Data.PositionsEntry
Data.QuaternionsEntry
Data.RgbaImagesEntry
Data.StringsEntry
Dimension
| Field |
Type |
Label |
Description |
| width |
float |
|
width in meters |
| height |
float |
|
height in meters |
| depth |
float |
|
depth in meters |
Error
| Field |
Type |
Label |
Description |
| code |
int32 |
|
a well defined error code |
| message |
string |
|
short description of error |
| description |
string |
|
long description of error (e.g. includes stack trace) |
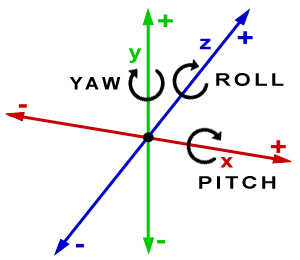
EulerAngles
| Field |
Type |
Label |
Description |
| yaw |
float |
|
z-axis in degrees (-180 to +180) |
| pitch |
float |
|
y-axis in degrees (-180 to +180) |
| roll |
float |
|
x-axis in degrees (-180 to +180) |
| local |
EulerAngles |
|
The rotation as Euler angles in degrees relative to the parent transform's rotation. |
ExtremePoint
| Field |
Type |
Label |
Description |
| position |
Position |
|
|
| pixel |
Point |
|
pixel data relative to the 2D canvas calculated with respect to intrinsics |
| accuracy |
float |
|
value between 0 and 1 how confident the position is |
Extrinsics
Rotation and translation vectors which translates a
coordinates of a 3D point to a coordinate system
| Field |
Type |
Label |
Description |
| rotation |
float |
repeated |
The rvec (rotation vector) represents the rotation of the 3D object (including, but not limited to another camera) with respect to the camera in 3D space. The vector’s direction represents the axis of rotation, and its magnitude represents the angle of rotation. |
| translation |
float |
repeated |
The tvec (translation vector) represents the translation of the 3D object (including, but not limited to another camera) with respect to the camera in 3D space. It defines how much and in which direction the object has moved from the origin (camera position). |
FileData
GlobalConfig
Histogram
| Field |
Type |
Label |
Description |
| red |
int32 |
repeated |
|
| green |
int32 |
repeated |
|
| blue |
int32 |
repeated |
|
Intrinsics
| Field |
Type |
Label |
Description |
| width |
int32 |
|
number of columns in pixels |
| height |
int32 |
|
number of rows pixels |
| ppx |
float |
|
describe the x pixel coordinates of the principal point (center of projection) |
| ppy |
float |
|
describe the y pixel coordinates of the principal point (center of projection) |
| fx |
float |
|
describe the focal length of the image, as a multiple of pixel width and height |
| fy |
float |
|
describe the focal length of the image, as a multiple of pixel width and height |
| model |
Intrinsics.Distortion |
|
describes which of several supported distortion models was used to calibrate the image |
| coeffs |
float |
repeated |
provides an array of up to five coefficients describing the distortion model |
| fov |
float |
repeated |
array of two elements in degrees defining field of view. first element is horizontal, second is vertical |
Item
| Field |
Type |
Label |
Description |
| id |
int64 |
|
required can be used to identify the item |
| name |
string |
|
required human readible item name |
| parent_camera |
Camera |
|
required camera item position is relative to |
| weight |
float |
|
estimated weight in kilograms |
| confidence |
float |
|
value between 0 and 1 how confident the object detection is |
| color |
Color |
|
rendition color of the item in the Ocellus viewer |
| delta_timestamp |
int64 |
|
unix style timestamp in ms |
| dimension |
Dimension |
|
|
| position |
Position |
|
required Position relative to the camera that produces this item |
| quaternion |
Quaternion |
|
required unless eulerAngles is set Quaternion relative to the camera that produces this item |
| euler_angles |
EulerAngles |
|
required unless quaternion is set Eular rotation relative to the camera that produces this item |
| extreme_points |
Item.ExtremePointsEntry |
repeated |
most extreme points of the item's contour |
| children |
Item |
repeated |
nested items |
| path_plan |
PathPoint |
repeated |
|
| contour |
Contour |
|
|
| pixel |
Point |
|
pixel data relative to the 2D canvas calculated with respect to intrinsics |
| histogram |
Histogram |
|
|
| accuracy |
float |
|
value between 0 and 1 how confident the position is |
Item.ExtremePointsEntry
Items
| Field |
Type |
Label |
Description |
| data |
Item |
repeated |
|
PageanationData
PathPoint
Represents a single point in a
path plan.
| Field |
Type |
Label |
Description |
| delta_time |
int64 |
|
time in ms since previous planned path point (e.g. previos PathPoint object in current array) |
| position |
Position |
|
Position relative to the item that is owner of the PathPlan |
| euler_angles |
EulerAngles |
|
EulerAngles relative to the item that is owner of the PathPlan |
| quaternion |
Quaternion |
|
Quaternion relative to the item that is owner of the PathPlan |
| pixel |
Point |
|
pixel data relative to the 2D canvas calculated with respect to intrinsics |
Point
Describes a single pixel position.
| Field |
Type |
Label |
Description |
| x |
double |
|
Increases from left to right |
| y |
double |
|
Increases from top to bottom |
Points
| Field |
Type |
Label |
Description |
| points |
Point |
repeated |
|
Position
Value relative to the camera source's
position in meters
| Field |
Type |
Label |
Description |
| x |
float |
|
|
| y |
float |
|
|
| z |
float |
|
|
| local |
Position |
|
Position of the transform relative to the parent transform. |
Quaternion
Set of numbers that comprise a four-dimensional vector space
| Field |
Type |
Label |
Description |
| x |
float |
|
|
| y |
float |
|
|
| z |
float |
|
|
| w |
float |
|
|
| local |
Quaternion |
|
The rotation of the transform relative to the transform rotation of the parent. |
Resolution
| Field |
Type |
Label |
Description |
| width |
int32 |
|
|
| height |
int32 |
|
|
Vector3Dim
CameraType
| Name |
Number |
Description |
| CAMERA_UNKNOWN |
0 |
|
| CAMERA_2D |
1 |
2D camera, produces rgba image output. |
| CAMERA_3D |
2 |
3D camera, The module's pointcloud output will be derrived from the camera instead of producing a flat pointcloud. If running in buddy mode with a 2D camera, the cameras need to be re-calibrated with the normal calibration procudure. Once this is done, 2D to 3D and 3D to 2D point conversions will be accurate between the 2D camera's rgba image outputs and the 3D camera's pointcloud outputs. |
| CAMERA_STEREO |
3 |
Same as 2D, except requires a buddy camera to be configured. UNIMPLEMENTED as of writing, just a placeholder for now. |
DataType
| Name |
Number |
Description |
| DATA_TYPE_UNKNOWN |
0 |
|
| DATA_TYPE_CAMERA |
1 |
|
| DATA_TYPE_CONTOURS |
2 |
|
| DATA_TYPE_ITEMS |
3 |
|
| DATA_TYPE_RGBA_IMAGE |
4 |
|
| DATA_TYPE_POINTCLOUD |
5 |
|
| DATA_TYPE_DECIMAL |
6 |
|
| DATA_TYPE_INTEGER |
7 |
|
| DATA_TYPE_STRING |
8 |
|
| DATA_TYPE_ERROR |
9 |
|
| DATA_TYPE_POSITION |
10 |
|
| DATA_TYPE_ROTATION |
11 |
|
Intrinsics.Distortion
| Name |
Number |
Description |
| distortion_none |
0 |
|
| distortion_modified_brown_conrady |
1 |
|
| distortion_inverse_brown_conrady |
2 |
|
| distortion_ftheta |
3 |
|
| distortion_brown_conrady |
4 |
|
Scalar Value Types
| .proto Type |
Notes |
C++ |
Java |
Python |
Go |
C# |
PHP |
Ruby |
| double |
|
double |
double |
float |
float64 |
double |
float |
Float |
| float |
|
float |
float |
float |
float32 |
float |
float |
Float |
| int32 |
Uses variable-length encoding. Inefficient for encoding negative numbers – if your field is likely to have negative values, use sint32 instead. |
int32 |
int |
int |
int32 |
int |
integer |
Bignum or Fixnum (as required) |
| int64 |
Uses variable-length encoding. Inefficient for encoding negative numbers – if your field is likely to have negative values, use sint64 instead. |
int64 |
long |
int/long |
int64 |
long |
integer/string |
Bignum |
| uint32 |
Uses variable-length encoding. |
uint32 |
int |
int/long |
uint32 |
uint |
integer |
Bignum or Fixnum (as required) |
| uint64 |
Uses variable-length encoding. |
uint64 |
long |
int/long |
uint64 |
ulong |
integer/string |
Bignum or Fixnum (as required) |
| sint32 |
Uses variable-length encoding. Signed int value. These more efficiently encode negative numbers than regular int32s. |
int32 |
int |
int |
int32 |
int |
integer |
Bignum or Fixnum (as required) |
| sint64 |
Uses variable-length encoding. Signed int value. These more efficiently encode negative numbers than regular int64s. |
int64 |
long |
int/long |
int64 |
long |
integer/string |
Bignum |
| fixed32 |
Always four bytes. More efficient than uint32 if values are often greater than 2^28. |
uint32 |
int |
int |
uint32 |
uint |
integer |
Bignum or Fixnum (as required) |
| fixed64 |
Always eight bytes. More efficient than uint64 if values are often greater than 2^56. |
uint64 |
long |
int/long |
uint64 |
ulong |
integer/string |
Bignum |
| sfixed32 |
Always four bytes. |
int32 |
int |
int |
int32 |
int |
integer |
Bignum or Fixnum (as required) |
| sfixed64 |
Always eight bytes. |
int64 |
long |
int/long |
int64 |
long |
integer/string |
Bignum |
| bool |
|
bool |
boolean |
boolean |
bool |
bool |
boolean |
TrueClass/FalseClass |
| string |
A string must always contain UTF-8 encoded or 7-bit ASCII text. |
string |
String |
str/unicode |
string |
string |
string |
String (UTF-8) |
| bytes |
May contain any arbitrary sequence of bytes. |
string |
ByteString |
str |
[]byte |
ByteString |
string |
String (ASCII-8BIT) |